
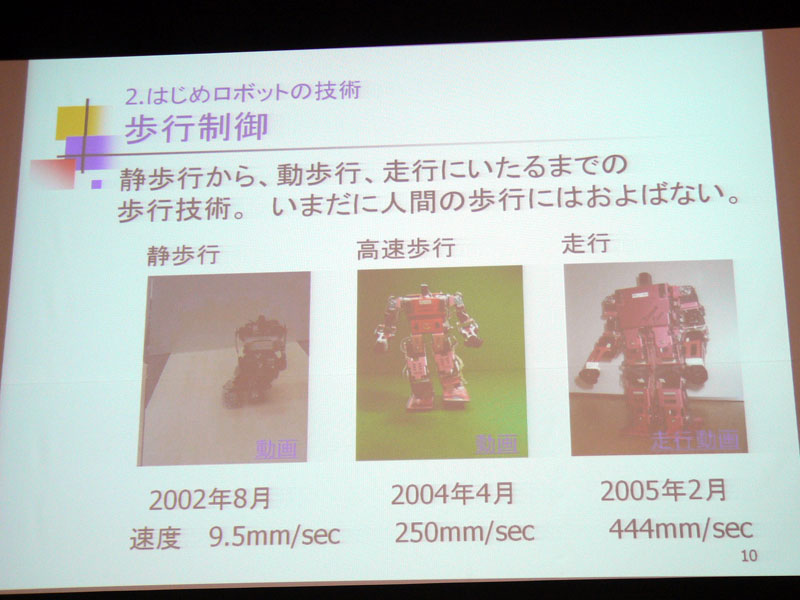
動 歩行
図-1 人間が歩行時に床に与える荷重と歩行振 動の例 1-7 す。図−2に、一般 的な木造住宅の8 畳間程度の大きさの 床における歩行振動 の実測例 9 を、(1) 数歩歩行した場合と (2)1歩のみの場合 を比較して示します。.
動 歩行. Weblio 辞書 > 英和辞典・和英辞典 > 動歩行の意味・解説 > 動歩行に関連した英語例文 例文検索の条件設定 「カテゴリ」「情報源」を複数指定しての検索が可能になりました。. 的動歩行が可能な脚ロボットの設計方法は,従来研究でもい くつか提案されているが12),13),それらに対して本研究では 脚歩行ロボットの最適設計としての構造系と制御系の同時設 計という観点から,受動的動歩行が可能な脚歩行ロボットの. 通常の膝サポーターって、 ただ膝を覆うだけのものが多いです。 が、ひざ動楽「歩行快適サポーター」は 膝の両サイドをガードして支える 「 フレックスチューブボー ン 」が.
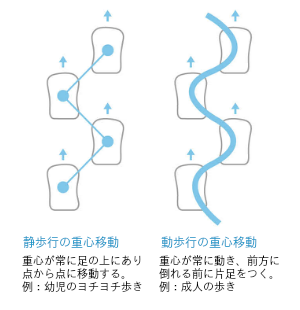
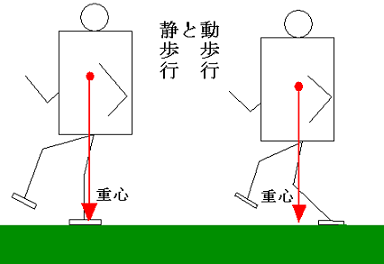
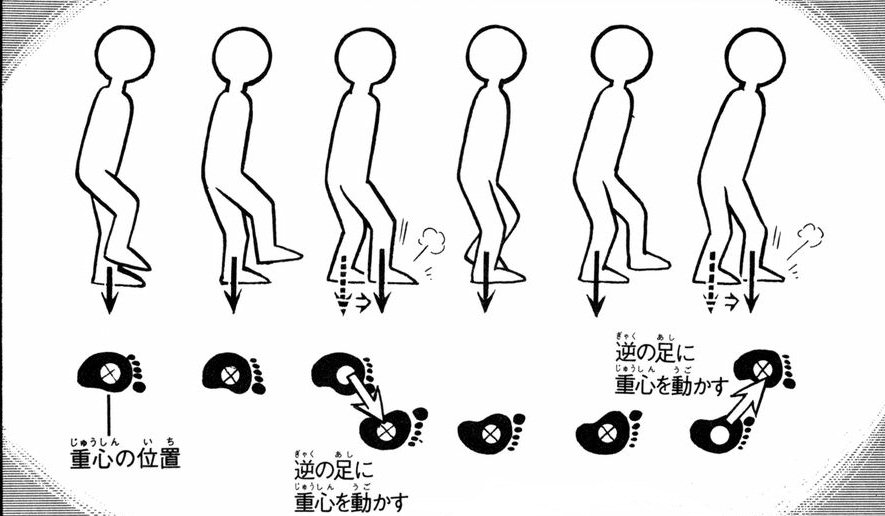
読み方: どうほこう 歩行 の 種類 の 一つ で、 歩行 の 最中 に 重心 が 固定 されないもののこと。 バランス を崩す 前に 足を 接地 させ なければ ならない 。 人間 が行 うのは動歩行であり、対となるものに「 静歩行 」が 存在 する。. 本研究は, 外乱の無い平担路において2足歩行ロボットWL-10RDによる動歩行を実現することを目的とする.一般に, 1歩行周期は単脚支持相と立脚切換相という2つの相に分けられる.この両相において動力学的動作が行われているものが動歩行であると考えられる.<BR>本論文では動歩行の制御方式として次のような方式を提案する.すなわち, 単脚支持相においては設定歩行パターンを用いたプログラム制御を行い, 立脚切換相においては切換状況に応じて足首部のトルクと機械インピーダンスを可変とするシーケンス制御を行う.<BR>実際には, 単脚支持相においては, 3次元動力学解析により, ZMP (Zero Moment Point) が支持脚の足底面内にあるように, 設定歩行パターンを作成する.立脚切換相においては, これをさらに4つの相に分割し, 脚接地時の衝撃を緩和しながら重心が後脚から前脚側に切換わるように, 足首部トルクと機械インピーダンスを適切に定める.<BR>このようにしてWL-10RDによる動・完全歩行が実現した.歩行実験の結果, 歩行時間は歩幅40 cm で1歩1.5 sec が達成された. 歩行動画から人を大きく切り出して観察しやすくする便利ツール 試用版のダウンロードは、こちら ※試用版は、動画に弊社のロゴマークが入ることを除けば製品版と同じの機能をお試し頂けます。 ※ご購入前に、必ず試用版にて画質や対象動画の取り込み可否等をお確かめください。.
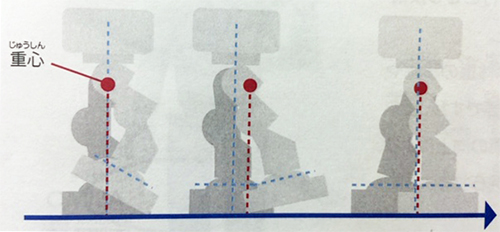
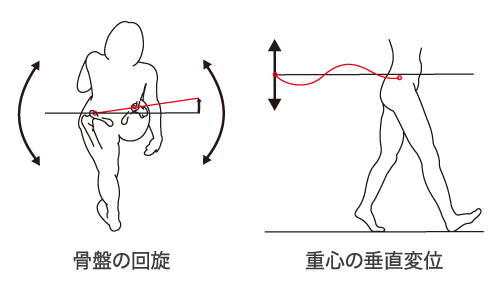
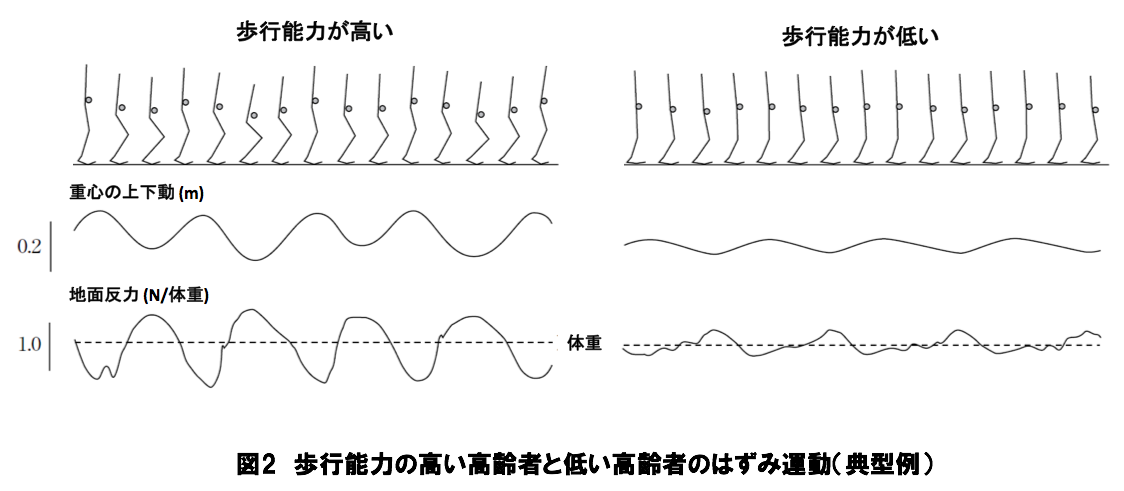
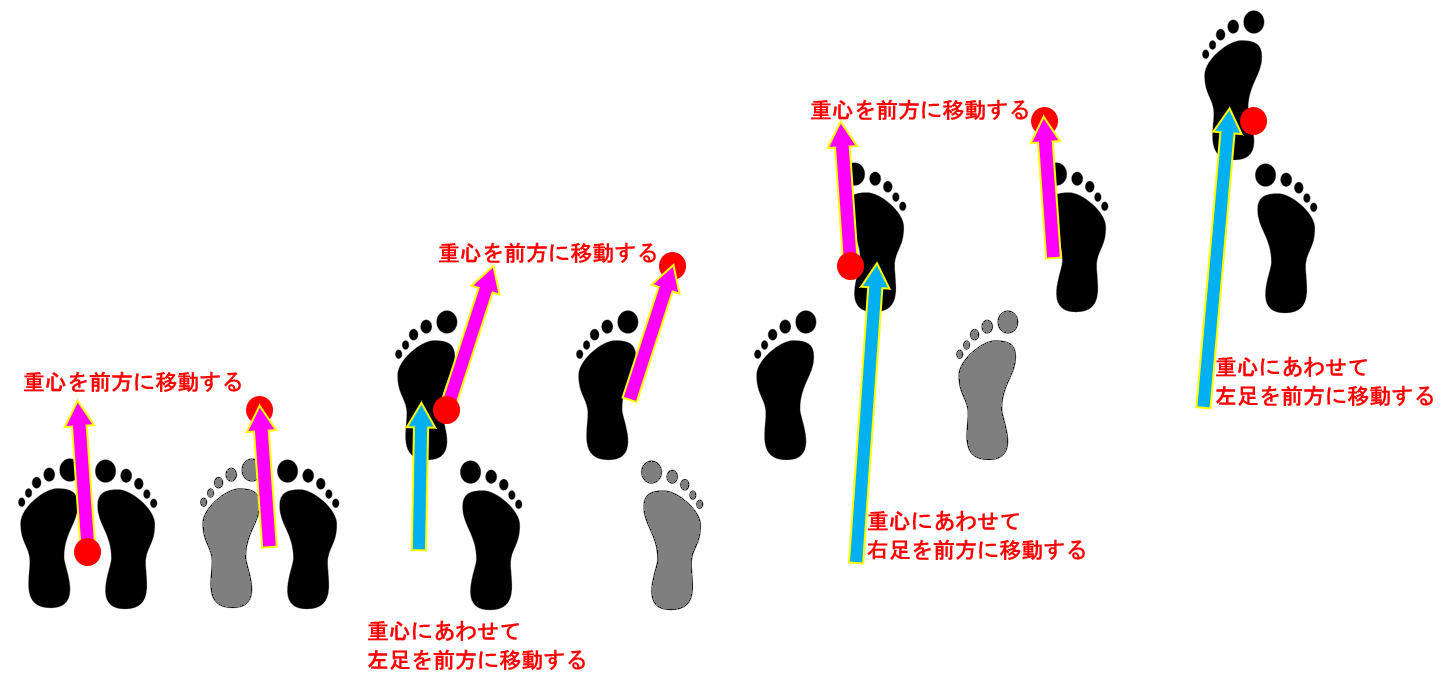
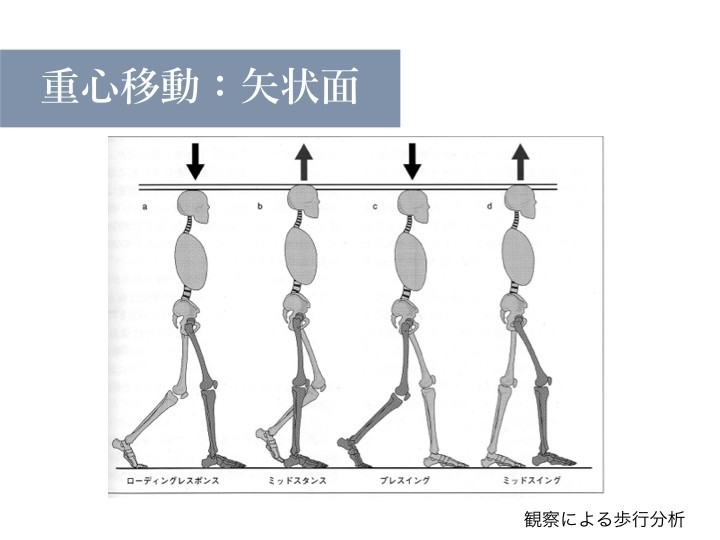
歩行は日常生活を送る上で基本となってくる動作の一つです。 リハビリでも歩行の獲得を目指し行うことが多くあります。 歩行は筋力に加え重心移動も重要な要素の一つです。 人はうまく重心の位置を移動させることで歩行を行っています。. 歩行分析(時期別) イニシャルコンタクト(ic) icとは、観察肢が床への足接地の瞬間を指します。 直前に足部が約1センチの高さから自由落下することによって、①足関節の底屈方向、②股関節の伸展方向、体幹の屈曲方向といった三つのモーメント(運動力)が発生します。. 乳児型歩行から成人型歩行に至る歩行筋電図の変化12 上下方向 上下方向でこの身体重心を観察すると、上下動を繰り返す。この上下動を画像分析から観察して みると数センチ程度(3cm 程度) である。ここからその加速度を求めてみるとその周期は高.
理想的な歩行動作を実現!Raspberry Pi 4搭載で高度な処理を可能にした二足歩行ロボット「Robovie-Z 」. との変遷を辿った。 歩行の6決定因子理論(Six Determinants of Gait Theory). 380 日本ロボット学会誌 Vol.19 No.3, pp.380~386, 01 学術・技術論文 4足歩行機械の動歩行時の姿勢安定化制御 倉爪 亮∗1 葉石敦生∗2 米田 完∗2 広瀬茂男∗2 Stabilizing Control for Dynamically Stable Walking of Quadruped Walking Robot.
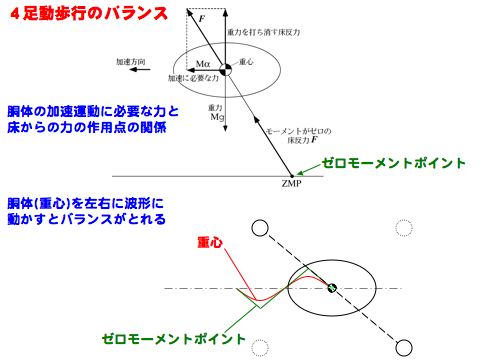
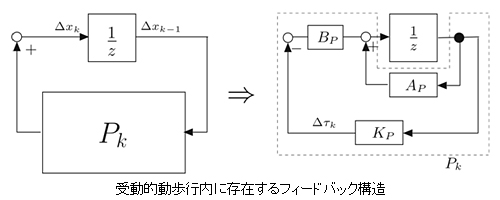
動診:歩行分析 歩行を診るとき股関節の動き中心に見ていく。 股関節の動的アライメントがどうなるかは二つ ・外旋+屈曲 ・内旋+屈曲 外旋では大腰筋 内旋では大腿筋膜張筋 ざっくりこの二つの筋に頼った歩行を呈する。 →歩行の運動連鎖. 受動歩行が注目されている.受動歩行とは,単純な構 造のロボットが緩い傾斜のついた坂をアクチュエータ なしに下りていく歩行形態である(McGeer 6)).受 動歩行が特徴的であるのは,入力トルクを必要とせず. 図1の ような擦り足歩行を行うモデルについて論じた.こ のモデルの上半身は前後,左 右に遥動可能な倒立振子であ り(モデルは三次元で考えられている),下 半身は機械的に リンクされ一定周期の固定シーケンスで運動する脚機構で.
歩行制御方式では, zmp を用いた軌道計画およびその制御(計測を含む) に集約される5~9. 動歩行ロボットの歩行現象を「力学現象的な視座」で見るという立場をとって まとめている。なぜなら,その機体には(常識的な)ロボットとしての三種の 神器である「アクチュエータ」,「センサ」 ,「頭脳」が組み込まれていないからで ある。. 受動的歩行ロボット Quartet II の歩行解析と歩行実験.
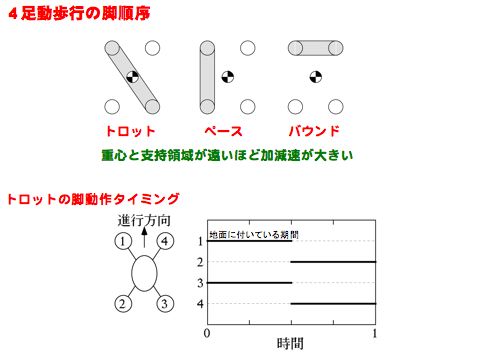
歩行実験システム構築と逆動力学解析 Dynamic Analysis of Biped Locomotion for Development of Bipedal Robot 写真1 isamuの外観 1 468 mm 55 kg RT-Linux 首2軸 腕6軸×2 グリッパ×2 脚7軸×2 計30軸 胴体部: 加速度計 角速度計 両足裏: 6軸力計 各モータ軸: エンコーダ. Weblio 辞書 > 英和辞典・和英辞典 > 動歩行の意味・解説 > 動歩行に関連した英語例文 例文検索の条件設定 「カテゴリ」「情報源」を複数指定しての検索が可能になりました。. ZMP規範型は動歩行の1種なのだが、ウォーク (常足)、トロット (速歩)、ギャロップ (駆け足)といった歩容 (歩様)をあらかじめ決めてあり、なおかつワンステップごとに踏み出すペースや次に足を置く位置などがすべて計算されている歩き方なのだが、力任せ的にエネルギーを消費する効率のよくない歩き方なので、自然界でそれをする動物はいない。.
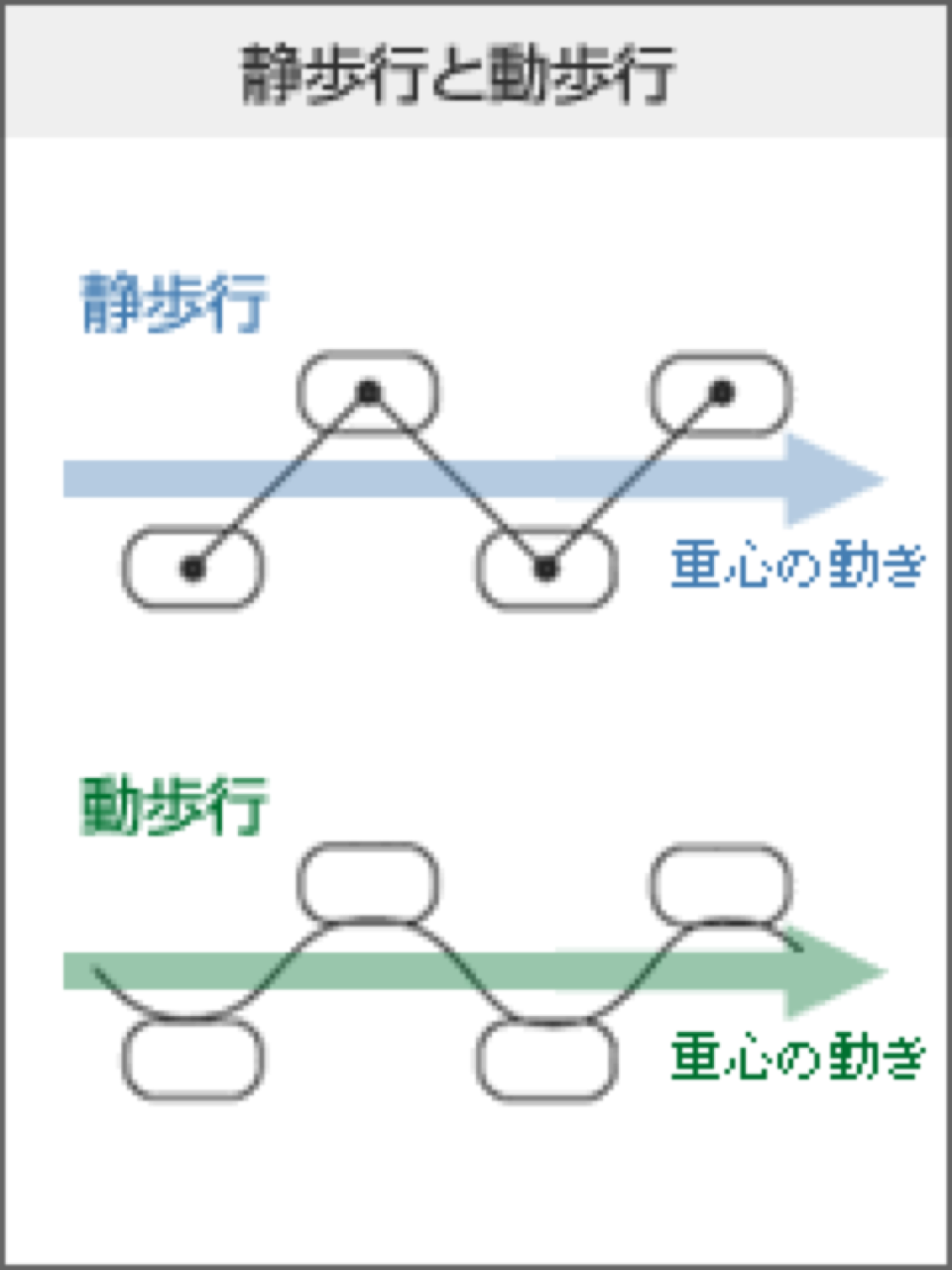
動歩行において、Mid Stanceの時は重心は支持基底面の中に入っていません。 それに比べ、 片脚立ちや静歩行をしている時は重心は支持基底面の中に入っており、中に入るまでウエイトシフトが起こっています。 これは内部モデルを考える上で大切なことなんですが、セラピストは訓練の中で. 動歩行の実現のためには、 加速度 や床からの 反力 などといった状況を的確に収集・判断し、これに対応し制御するための技術開発が必要になる。. シュテファン・エッガートの「歩く人」、ミュンヘンのシュバービングにある公共アート。 歩行 (ほこう)とは、 足 ( 脚 )を持つ 動物 が行う、足による 移動 のうち、比較的低速のものを言う。�.
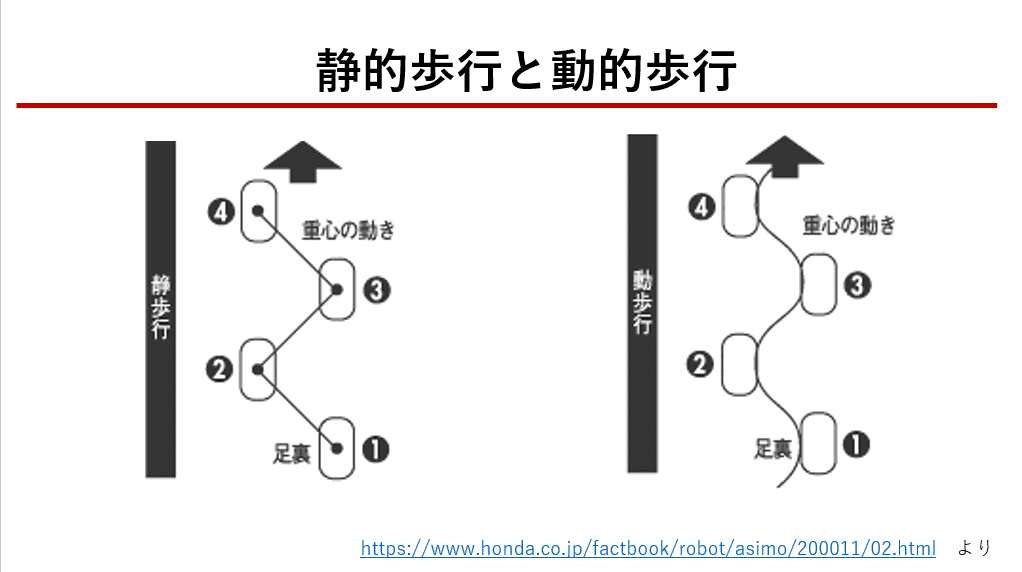
人間と同じ動歩行をしています。 前進と後退歩行(1Mbyte,MPG) だから何。なんて言われるかも。(色々苦労が詰まってます) 静歩行(1.3Mbyte,MPG) 静歩行は重心が常に接地面内にくるような歩き方(抜き足、さし足の感じ) 途中でモータを停止していますが倒れません。. 前回の「静歩行と動歩行」の話を議論する際に、よくZMPという言葉を引き合いに出して説明する場合があります。その時によく書かれているZMPの軌跡として下図の右のような絵が出ていますが、実はコレ、大ウソです。 ZMPというのは、ゴスワミさんによってCOP(Center Of Pressure:圧力中心)と同じだ. 動歩行 は DW の唯一の意味ではありませんのでご注意ください。DW の定義が複数ある場合がありますので、DW のすべての意味については辞書で 1 つずつチェックしてください。 英語で定義:Dynamic Walking.
受動的動歩行機械 Quartet II の歩行解析と歩行実験 大須賀 第28回制御理論シンポジウム資料, 1999, 147-152, 1999. Zmp は歩行における脚の振り運動時の安定性を示す指標であるが, 必ずしも歩行の安定性を示す 指標ではない.

歩行者デッキ供用開始前後の利用動線 図解 渋谷駅西口に新 空中回廊 シブヤ経済新聞
Http Www F Waseda Jp Ykawa Sp Biomch08 3 Pdf

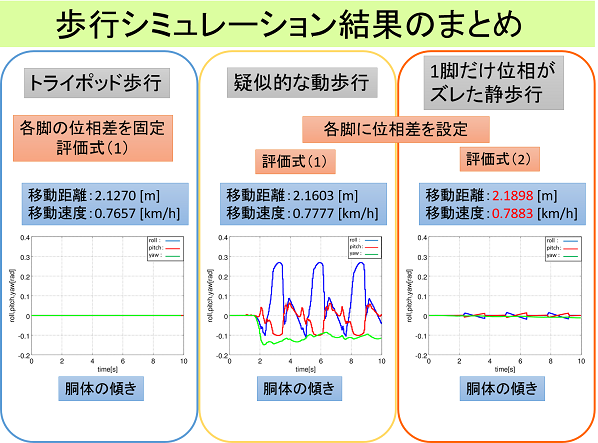
Pdf 2a2 O08 On Tripod Robotic Walking Utilizing Ground Reaction Force
動 歩行 のギャラリー
足のお悩み相談コラム Greenbox グリーンボックス
遺伝的アルゴリズム Ga シミュレーション その2 東京海洋大学 田原研究室

ぼやけた動歩行のビジネス人々 のシルエット の写真素材 画像素材 Image

Cinii 博士論文 抑制足形状を有する受動的動歩行を規範とする2足歩行ロボットに関する研究

直動リンク装置及びそれを用いたロボット並びに2足歩行ロボット
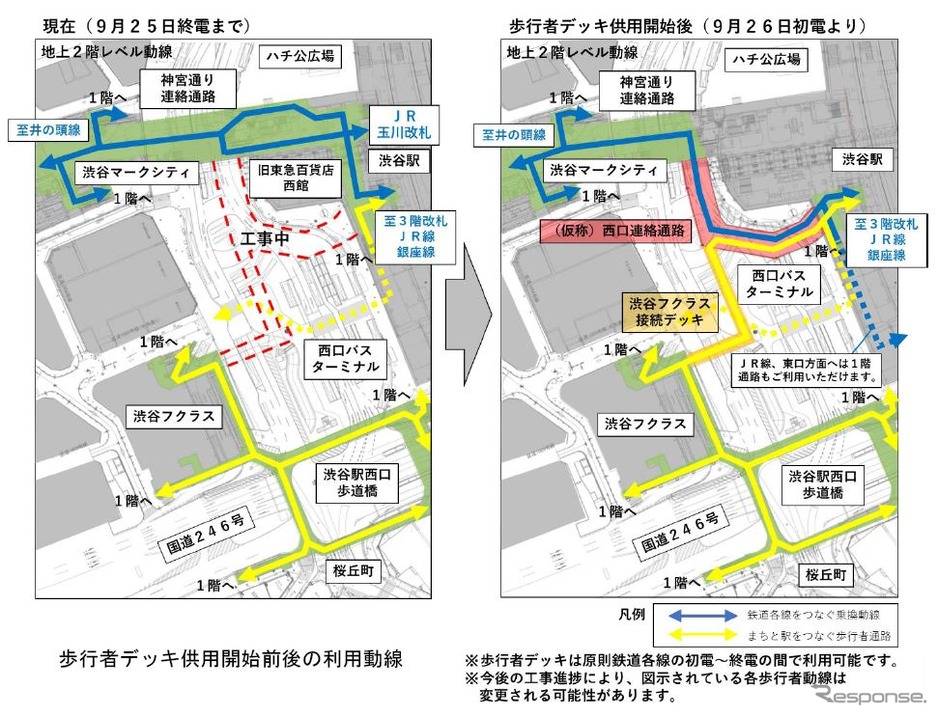
渋谷駅西口の新歩行者デッキ 供用開始は9月26日 旧東急百貨店がいよいよ解体へ 6枚目の写真 画像 レスポンス Response Jp

07 号 腰上下動による二足歩行ロボットとその歩行制御方法 Astamuse
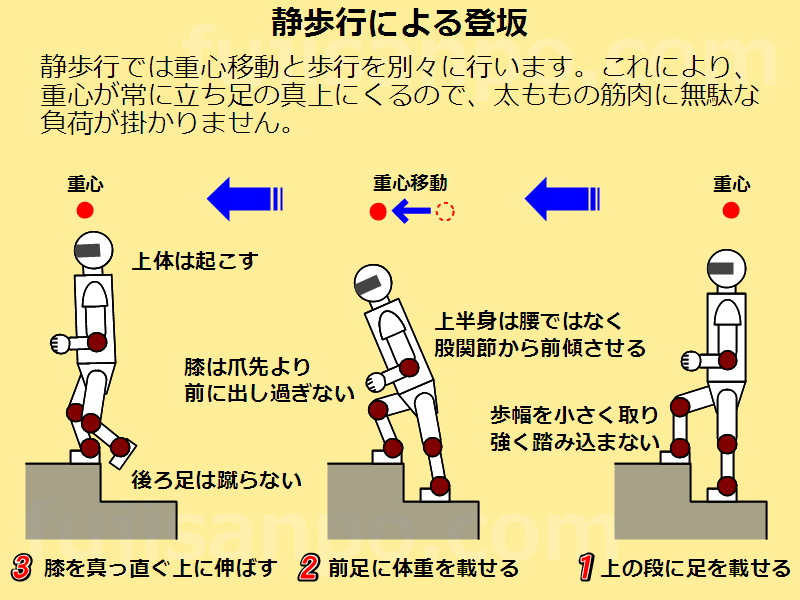
プリンスルートの登り方 富士さんぽ
Http Www St Nanzan U Ac Jp Info Gr Thesis Ms 09 06mi180 Pdf

歩行中の横揺れ 上下動は関節を痛める 外反母趾 膝痛 タコ魚の目専門 競歩技術を取り入れたウォーキング教室を開催 日常生活動作を改善し痛い 辛いを解消 昭島市の 安心女性の整体院
伊豆の美術解剖学者 Twitter પર 呼吸 拍動 歩行 摂食 昼夜 月齢 四季 成長等々 我々は 意識とは無関係のリズムの中で生きている この意識とは無関係のリズムに意識が介入すると たちまち心身のバランスが崩れる 心身のバランスは制作においても基本である
Untitled Page

歩行の再考 新潟のコンディショニングトレーナー高島善史のブログ
二軸歩行で名古屋を歩く ニュース 名古屋伏見 丸の内のボディケア ストレッチフィットネス ファイン Bodycare Stretchfitness Fine

さて 今日は動的姿勢バランスの力学について その基礎を解説します Bmt Shinichiro Ishii Facebook
Http Www F Waseda Jp Ykawa Sp Biomch08 3 Pdf

二足歩行ロボット Wikipedia

Biped Robot In Mel
受動的動歩行に関する研究 大須賀 杉本研究室
その一歩一歩のためのテクノロジー Of Palro Garden

足の構造と機能2 靴と足の話 シューズセンターいづみ 独自のフィッティング技術で貴方に最適なスポーツシューズを提供
足の構造と機能2 靴と足の話 シューズセンターいづみ 独自のフィッティング技術で貴方に最適なスポーツシューズを提供

受動歩行

4足歩行制御 ロボ學 Robogaku

上下動するサドルを装着した開脚三輪歩行車

二足歩行ロボット Wikipedia
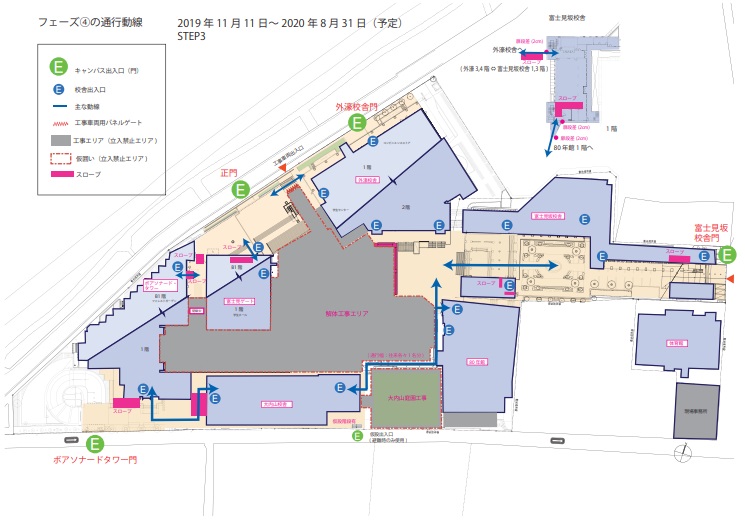
55 58年館建替工事に伴う工事範囲 歩行者動線について 8 25更新 法政大学

國のまほろばをみゆ 武道論 歩行その5

人類の誕生
Pdfs Semanticscholar Org Ce79 Cdd7e25e5732f1fcefcdec90d6d68a1 Pdf

15 0704号 北辰一刀流歩行術訓練用靴 Astamuse
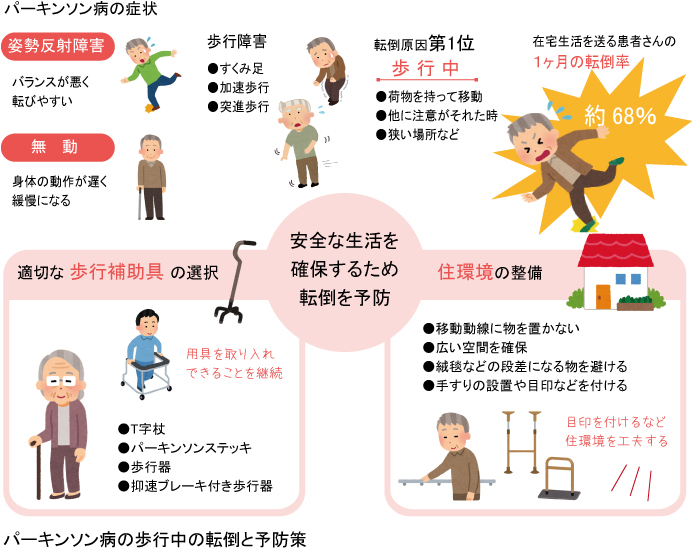
パーキンソン病の歩行 歩行補助具を中心に いずみの病院 高知県高知市薊野北町
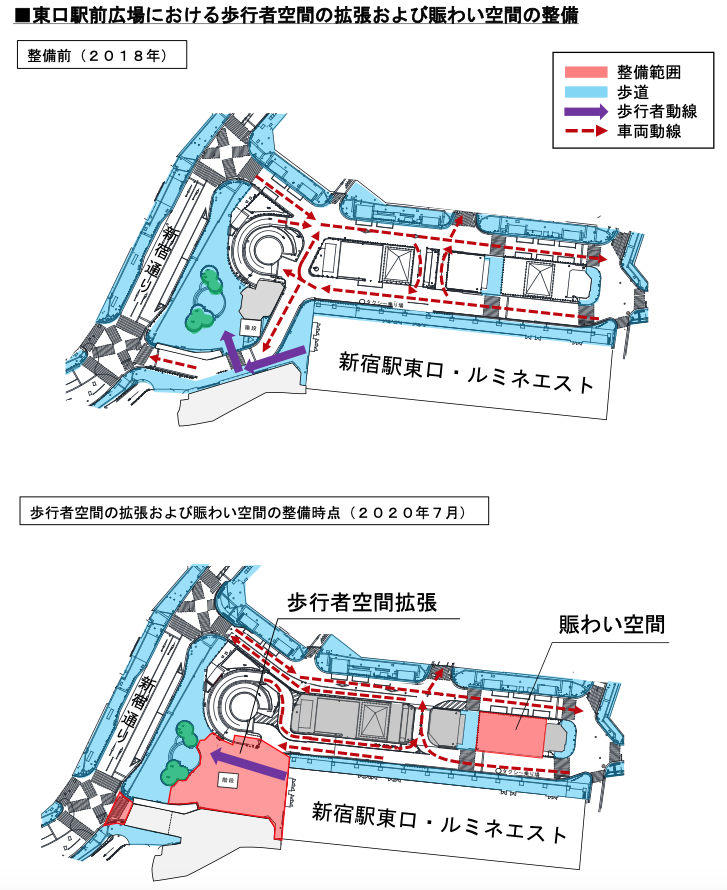
道路開通情報 Twitterren 新宿駅のリリース 東西自由通路供用開始がメインだけど 東口の車両導線も変更になるようです 歩行者と車両の動 線を分離するために駅前広場内の車両動線を変更し 歩行者空間を拡大する工事を東京都と共同で進めます 歩行者空間拡張の完成

Hmv店舗在庫一覧 受動歩行ロボットのすすめ 重力だけで2足歩行するロボットのつくりかた 衣笠哲也 Hmv Books Online

継ぎ足歩行を使った動的バランステスト 理学療法士 作業療法士のためのスキルアップノート
歩行障害
歩行障害の種類とその原因とは 御所南リハビリテーションクリニック
Robot Watch ニュース 坂本元氏 産業技術短期大学で講演

小脳性運動失調を有する方の歩行の特徴とは 脳の治療を考える
二足歩行ロボットの製作
プログラミング 二足歩行するロボットの仕組みって 小学生 Net
アンウェイシステム ネクステップ 酒井医療株式会社
歩行分析に必要な臨床的視点 重心と床反力の関係性 脳外臨床歩行セミナー

二足歩行ロボット Wikipedia

27 5 24歩行の動的姿勢制御のバイオメカニクスと理学療法

動歩行に関する公開公報一覧 Astamuse
厚木ymcaymcaあつぎ保育園ホサナあゆの学校 公式ブログ 厚木ymca健康教育部 歩行測定会実施のお知らせ
指で噛む バーリトゥード日記
動歩行と静歩行3 健康になろう 楽しく生きよう
2

腰上下動による二足歩行ロボットとその歩行制御方法

ロボット工学第8回資料

文献抄読 孤独のpt

二軸歩行 疲労感少なく 和の動作 で年始めの一歩 ヘルスup Nikkei Style
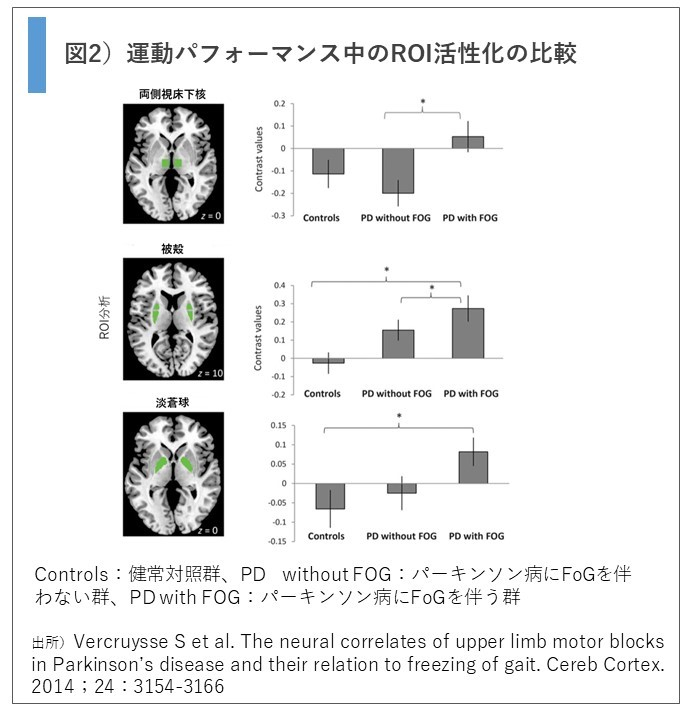
パーキンソン病の臨床症状について 2 無動 Xpert
Pdfs Semanticscholar Org 7c59 d6604cdadd43a1418ed4fb Pdf
ゼロモーメントポイント Wikipedia

1997 27号 2足歩行ロボット Astamuse

動歩行に挑戦
Asimo
Rikupedia 陸上競技の理論と実際

Dynamic Gait Index Dgi Study Channel
初挑戦 歩行モーション
walk_5cuts.gif)
Dr Buddy 居着きの仕組みと問題点 Page1
Pdfs Semanticscholar Org 7c59 d6604cdadd43a1418ed4fb Pdf

ぼやけた動歩行のビジネス人々 のシルエット の写真素材 画像素材 Image

13 92号 歩行支援装置 及び歩行支援プログラム Astamuse
動物の歩き方 3 豊葦原中津谷のニニギ

Zmp ゼロモーメントポイント しゃちょ ロボットうんちくブログ
企画 5 ロボットに足の指と土踏まずをつけて下さい

ロボット工学第8回資料
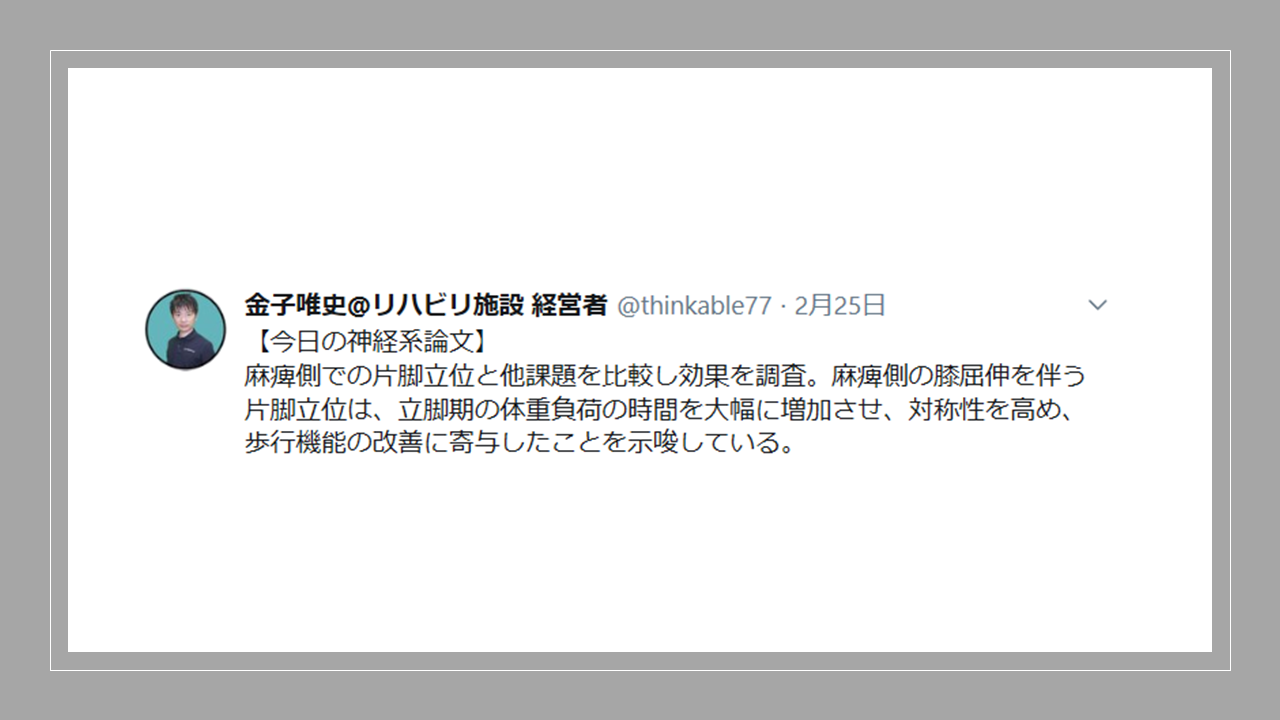
Vol 437 片脚立位での運動が脳卒中者の動的バランス 歩行能力を高める 脳卒中者の麻痺側片脚立位運動の即時効果 脳卒中 神経系 自費リハビリ施設 Stroke Lab 東京
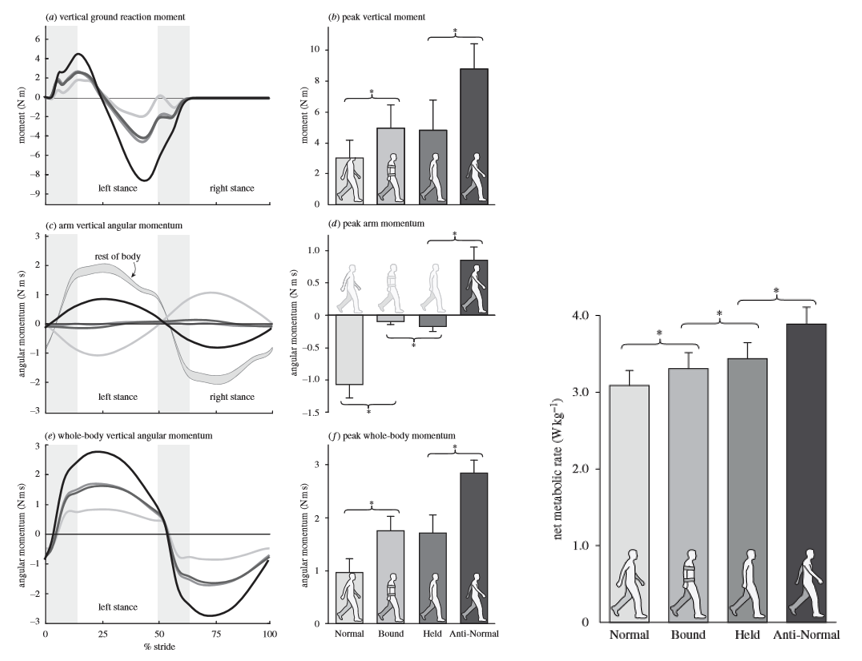
Vol 112 歩行における腕振りの重要性 脳卒中 脳梗塞リハビリ論文サマリー 脳卒中 神経系 自費リハビリ施設 Stroke Lab 東京
Ppt 2 足歩行ロボットの改良 とモーション作成 Powerpoint Presentation Id
アプローチの再考になるかも 静歩行と動歩行について考える おっしー 理学療法士note Note
Untitled Page

研究レポート2 尾方寿好 スポーツ保健医療学科 中部大学
Mini Bestestを使ってみよう やすひろ 動作のバイオメカニクスと転倒予防 Note
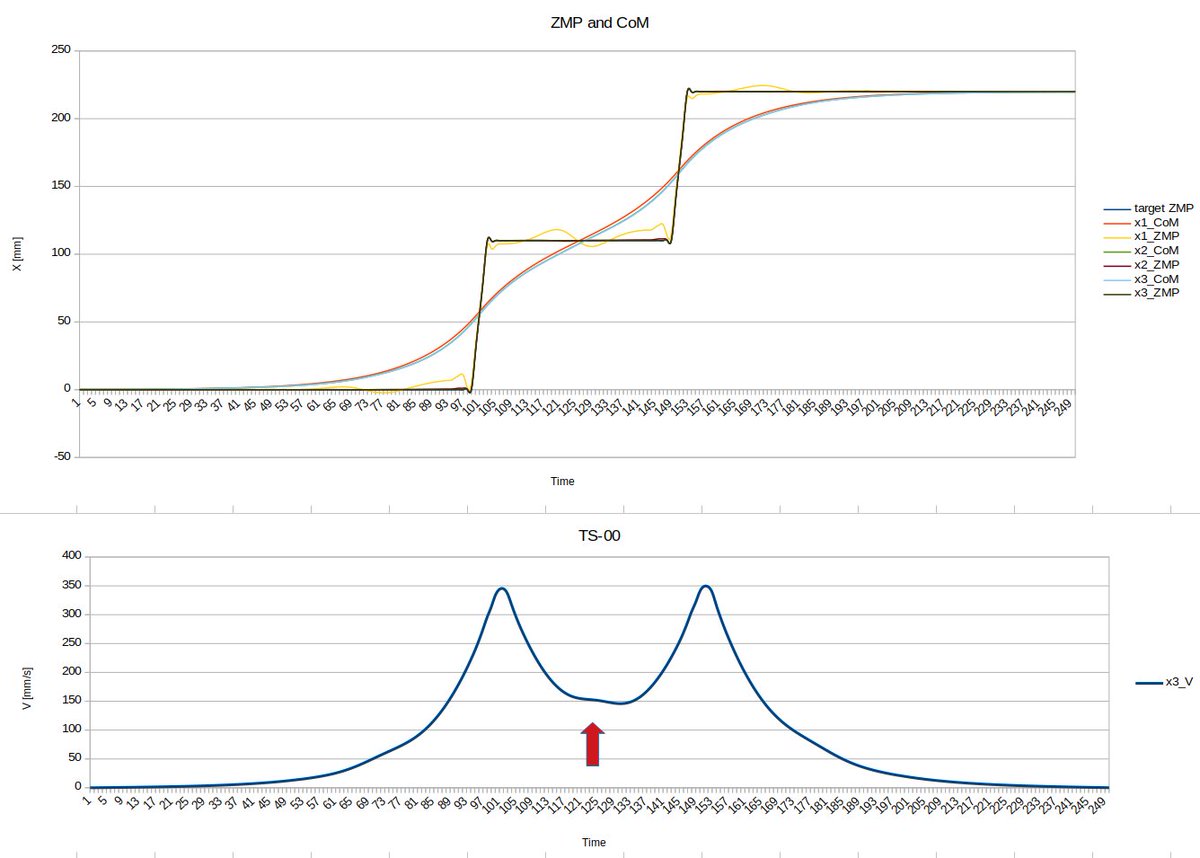
ট ইট র 真広 まひろ 新ロボ 直動関節を用いた2足歩行ロボット 用のコードを書き始めました Zmp規範歩行 オフライン とりあえず一発目のプロット Zmpの誤差は十分に小さくなっていますが 赤矢印のところ 重ねたグラフが見やすい 新ロボの
凹凸路面上の動的2足歩行制御 ロボ學 Robogaku

静歩行 と 動歩行 支持基底面と重心の関係 理学療法の臨床の現場から ベストプラクティスを考える

ひざ動楽 歩行快適サポーター の評判と口コミ 膝の痛みに効くサプリメント プロテオグリカンの効果は
受動的動歩行に関する研究 大須賀 杉本研究室
歩行分析からトレーニング指導 平 純一朗 Pt Jspo At Note
6 バランス能力の低下 酒井医療株式会社
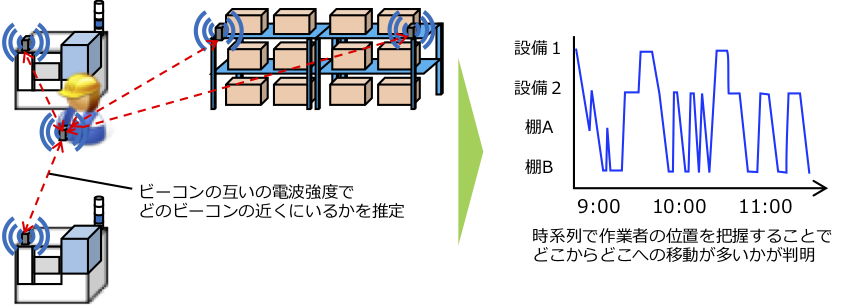
No 9 Iot活用の動線分析による歩行 運搬のムダ抽出 改善事例紹介 カイゼン屋

日本財団図書館 電子図書館 フィットネス向上の科学 1998 体育科学 第27巻
Http Web Sfc Keio Ac Jp Naka Pdf Graduatethesis Nakanishi Hamada Pdf

14 0149号 機構制御装置 プログラム及び機構制御方法 Astamuse

南町田拠点創出まちづくりプロジェクト 町田市 東急電鉄
seihokou.gif)
Dr Buddy 居着きの仕組みと問題点 Page1
歩行学習支援ロボット Orthobot を開発 ページ 3 テック アイ技術情報研究所
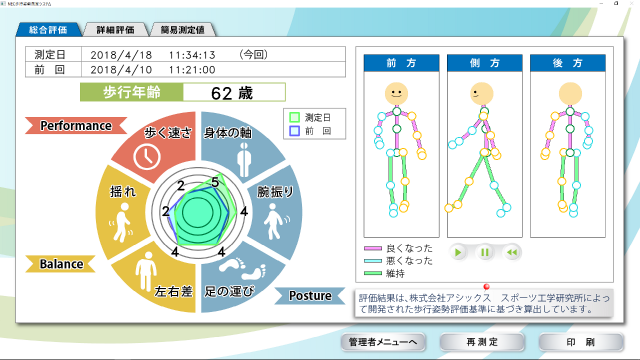
歩く姿勢 を数値化し 顧客の課題解決を支援nec 歩行姿勢測定システム 業種別活用例 介護施設 無料ダウンロード 日本の人事部
6日でできる 二足歩行ロボット自作 Sw編 Day6 下書き 中野島ロボット
2

人工知能ai Of Palmi Garden

Dr Inokuchiの健康講座



